NessCap 50 V 10 F ultra-capacitor unit
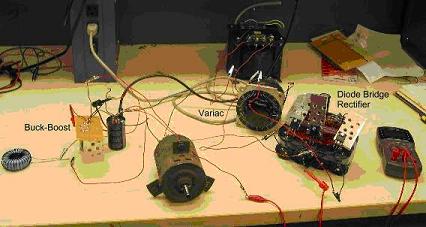
Implementation of a capacitor drive. The variac is used to simulate a capacitor voltage.
NessCap 50 V 10 F ultra-capacitor unit |
Implementation of a capacitor drive. The variac is used to simulate a capacitor voltage. |