


![]()
![]()
![]()
![]()
![]()
Below are some of our early scriblings for a robot design, I would tell you what they are and meant but I can't work them out!
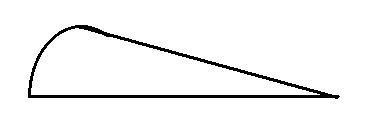
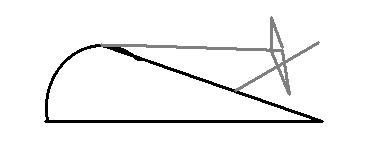
We have had lots of ideas for robots, but the only idea that has remained consistent is to have a sloped front with a lifting section and a big axe.
The design we are using is best described as half an ice cream cone, except that it isn't tapered at the front.
The foremost section of the slope raises upwards and is used for lifting opponents off of the ground. The axe extends out of the back and swings forwards so that the blade goes into a slot in the lifting flap. This allows us to reverse up to an opponent and beat it, or get it up the front of the robot, lift it so it is stuck on our back and then beat it with the axe
.
For motion we wanted to have tracks made using double sided timing belts and timing gears, but since our motors came with wheels and realising how difficult it would be to make these tracks work, we switched to four wheel drive. The front wheels are as far forwards as the body work allows and the edge of the back wheels sits about 1/2 over the end of the chassis. This should mean that if we get pick up by the front of the robot, we should still have drive to the back wheels as we are being lifted, allowing us to hopefully reverse away from the robot lifting us
.In order to maximise our chances of being selected for RW, we have decided to paint the robot in either desert or purple/blue camoflauge. Desert would be better as it is lighter. We are also going to fit head lights to the front of the robot and indicators at the rear-these will actually flash when the robot turns
J .![]()
